液滴遇上柔性电子,让机器人实现“72变”
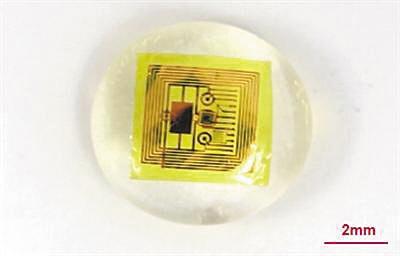
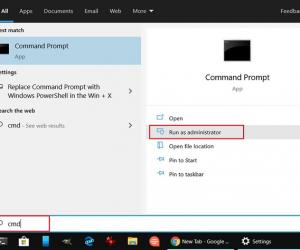
基于液滴和柔性电子技术的液态全柔性智能机器人结构构成天津大学供图
《西游记》中孙悟空“72变”化身小虫,钻到妖怪肚子里大显身手的故事,表现了古人对于微观世界的大胆创想。近日,天津大学精仪学院黄显教授团队成功研发全球首个液态全柔性智能机器人,能“72变”的“血管医生”让神话成为现实。相关研究成果近期发表于国际工程和自然科学领域权威期刊《尖端科学》,并得到国家自然科学基金和天津自然科学基金等支持。
目前软体机器人存在“硬伤”
如今机器人技术已经被应用到各个领域,有一类机器人可以根据所处的地理环境,自由改变其结构和外观,具有运动能力、变形能力和传感测量能力,这类机器人被称为无定形软体机器人。
“这类机器人是基于柔性电子器件所具有的超薄、柔性、可延展的类皮肤特性,利用柔性电子技术研发的微型软体机器人,不仅可以反复改变形状,还实现了运动、抓取、运输和触觉感应等功能。”黄显教授团队成员、博士研究生周明行介绍,其在生物医学领域和安全领域有着自己独有的优势。在生物医学领域,无定形软体机器人在可控药物释放以及植入式医疗机器人等方面有着巨大的潜力,微型软体机器人可以通过注射方式随血液进入血管,借助传感元件和包载药物,对血液和血管进行测量,实现定点可控药物释放等功能。在安全领域,无定形软体机器人能进入人类无法进入或者危险的环境,并对环境中的物理、化学和生物等信号进行检测,环境适应能力强,在排险、探伤、侦查、军事安全领域具有广泛的应用前景。
“不过现阶段,已有的或者在研的软体机器人依然存在着一些‘硬伤’。”周明行解释,这是因为,目前柔性电子器件主要贴附于或者集成在有机体、机器和电子产品上工作,依附物往往位置固定,活动范围受限。部分软体机器人虽然可以实现运动、抓取、运输和触觉感应等功能,但这些功能的实现主要依赖于传统的刚性传感元件和电路,还没有做到机体和功能电路的全柔性构造,严重阻碍了性能的实现,比如普通软体机器人无法进入或者通过狭窄的血管、缝隙。这就需要全柔性、无固定形态,像液体一样的机器人出现,来满足这种需求。


- 01-11全球最受赞誉公司揭晓:苹果连续九年第一
- 12-09罗伯特·莫里斯:让黑客真正变黑
- 12-09谁闯入了中国网络?揭秘美国绝密黑客小组TA
- 12-09警示:iOS6 惊现“闪退”BUG
- 07-17亚马逊海外购上线顺丰国际直邮服务
- 07-17Omdia预测XR显示屏市场短期稳定,长期增长潜
- 07-17微软Word升级Draft AI:支持智能改写、扩写
- 07-17特斯拉Optimus人形机器人取得显著进展,国内
- 07-17vivo智能车载系统升级,新增视频类应用














 粤公网安备 44060402001498号
粤公网安备 44060402001498号